ros GPS信息存储节点
writer:lIcht email:lIcht.gzl@gmail.com date: 2020.2.9
为了在上位机上现实小车在谷歌地图上的轨迹,所以需要对GPS的轨迹做记录。写此节点的目的就是接收ros无人小车上的GPS信息,存储成文件以方便上位机读取。因为在家没有条件实际对小车进行测试,所以编写测试节点发送变化的gps信息。
一、存储gps信息节点的编写:
xxxxxxxxxxusing namespace std;double last_lat = 0;double last_lon = 0;//定义文件输出流ofstream points;void callback(const sensor_msgs::NavSatFix::ConstPtr& msg){ if (msg->latitude != last_lat || msg->longitude != last_lon) { ROS_INFO("write GPS points lat: %f, long: %f", msg->latitude, msg->longitude); //ROS_INFO("write GPS points lat: %f, long: %f", last_lat, last_lon); points.open("gps_points.csv", ios::out | ios::app); // 打开输出的文件,位置在该工作空间下 // 写入数据,第一列为lat, 第二列为long points << msg->latitude << "," << msg->longitude << endl; points.close(); } last_lat = msg->latitude; last_lon = msg->longitude;}int main(int argc, char **argv){ //清空上一次的数据 points.open("gps_points.csv", ios::out | ios::trunc); points.close(); ros::init(argc, argv, "gps_line"); //初始化ROS,节点名必须唯一。 ros::NodeHandle n; //节点句柄实例化 ros::Subscriber sub = n.subscribe("fix", 1000, callback); //向话题订阅,一旦发布节点在该话题上发布消息,本节点就会调用callbck函数。 ros::spin(); //程序进入循环,直到ros::ok()返回false,进程结束。 return 0;}
一、测试节点的编写:
xxxxxxxxxxdouble lat = 40.0350682;double lon = 116.3421781;int main(int argc, char** argv){ // Step 2: Initialization: ros::init(argc, argv, "imu_gps"); ros::NodeHandle n; //定义GPS数据的消息发布 ros::Publisher GPS_pub = n.advertise<sensor_msgs::NavSatFix>("fix", 20); ros::Rate loop_rate(10); while(ros::ok()) { //gps消息的赋值和发布 sensor_msgs::NavSatFix gps_data; gps_data.header.stamp = ros::Time::now(); gps_data.header.frame_id = "base_link"; //gps_data.status="working"; gps_data.latitude=lat; gps_data.longitude=lon; gps_data.altitude=40.5; GPS_pub.publish(gps_data); ROS_INFO("GPS points lat: %f, long: %f", gps_data.latitude, gps_data.longitude=lon); ++lat; ++lon; ros::spinOnce(); loop_rate.sleep(); } return 0;}
三、测试结果:
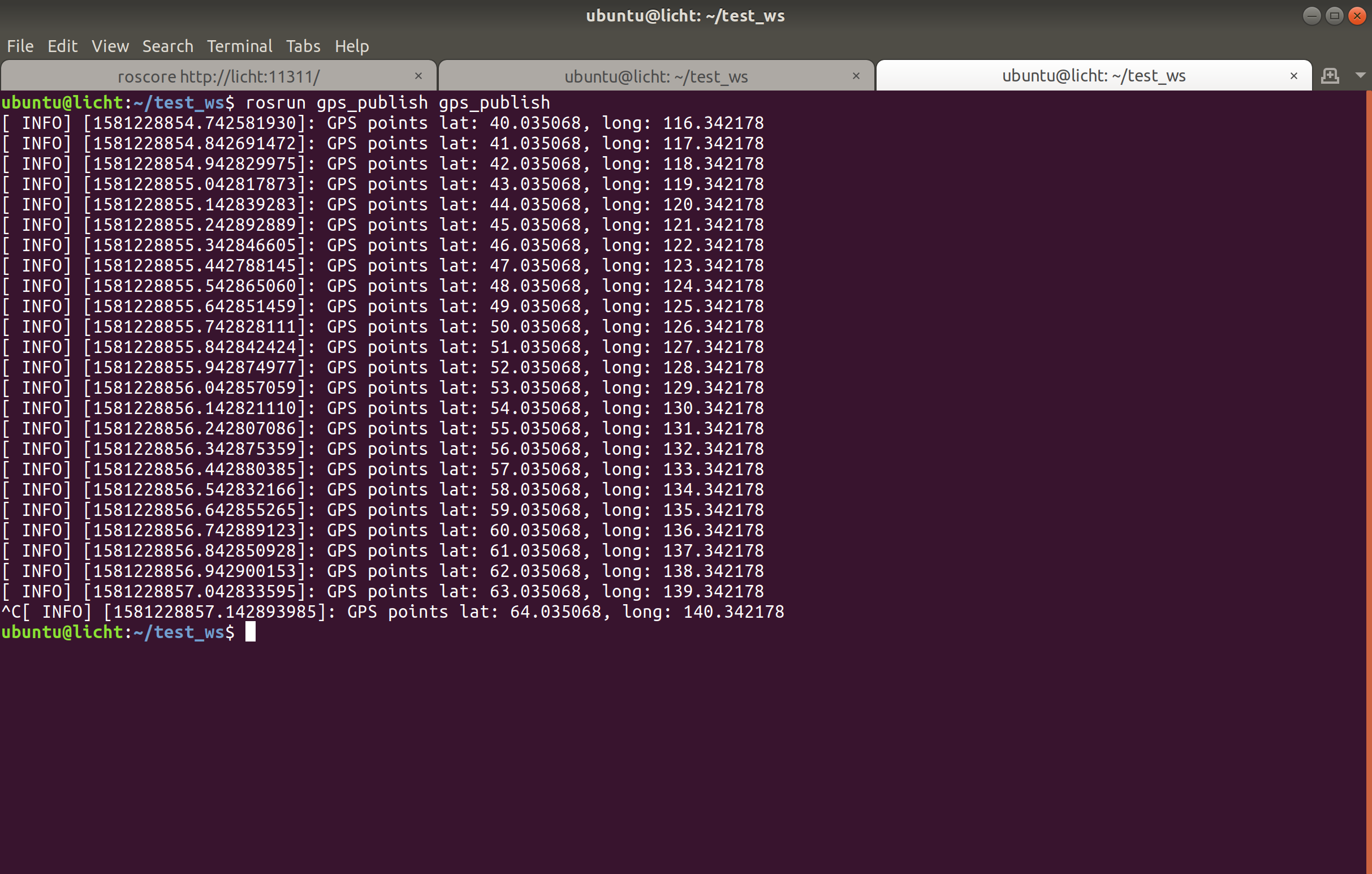
1、正常发送gps主题:
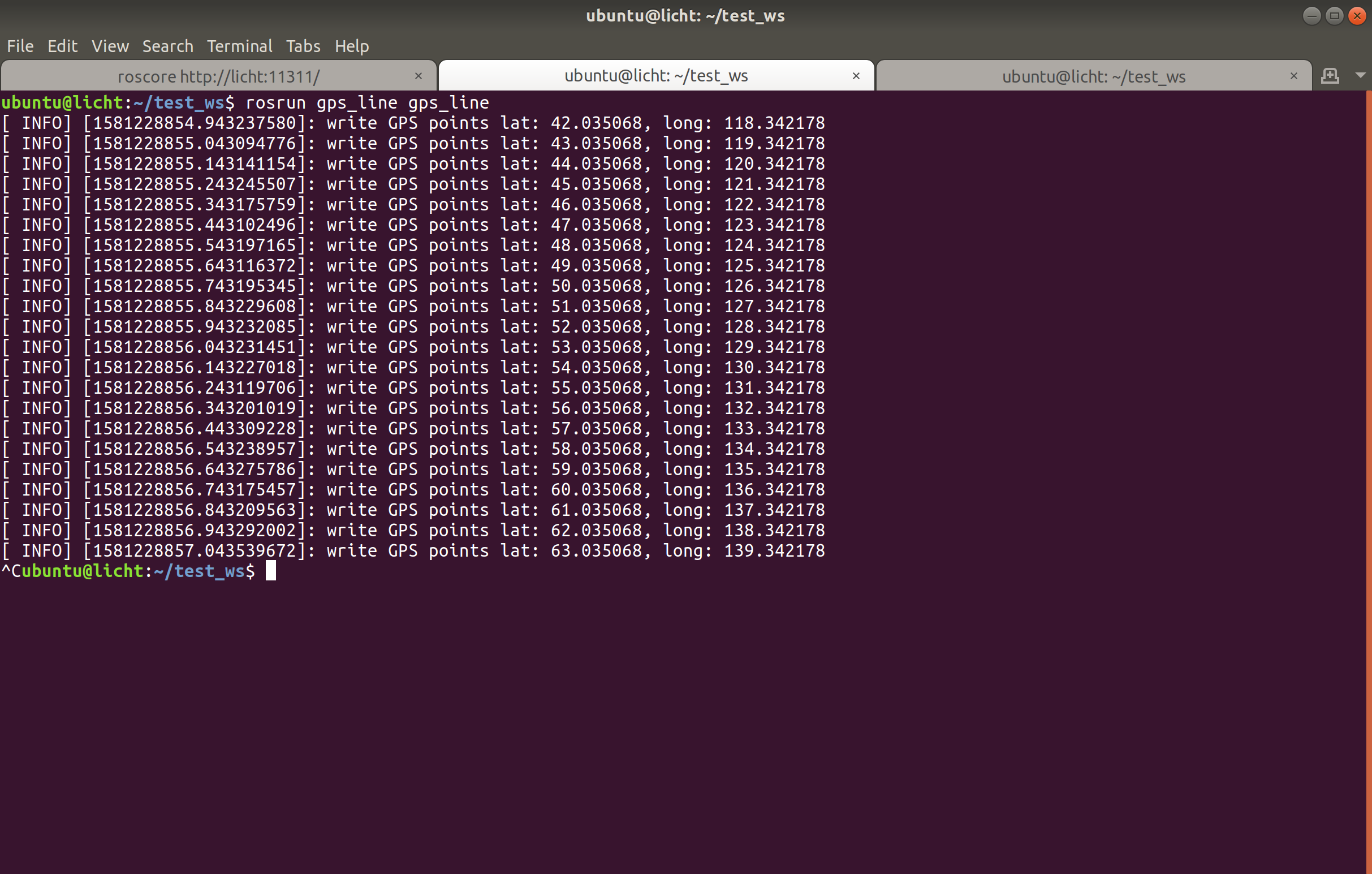
2、gps信息写入节点作用:
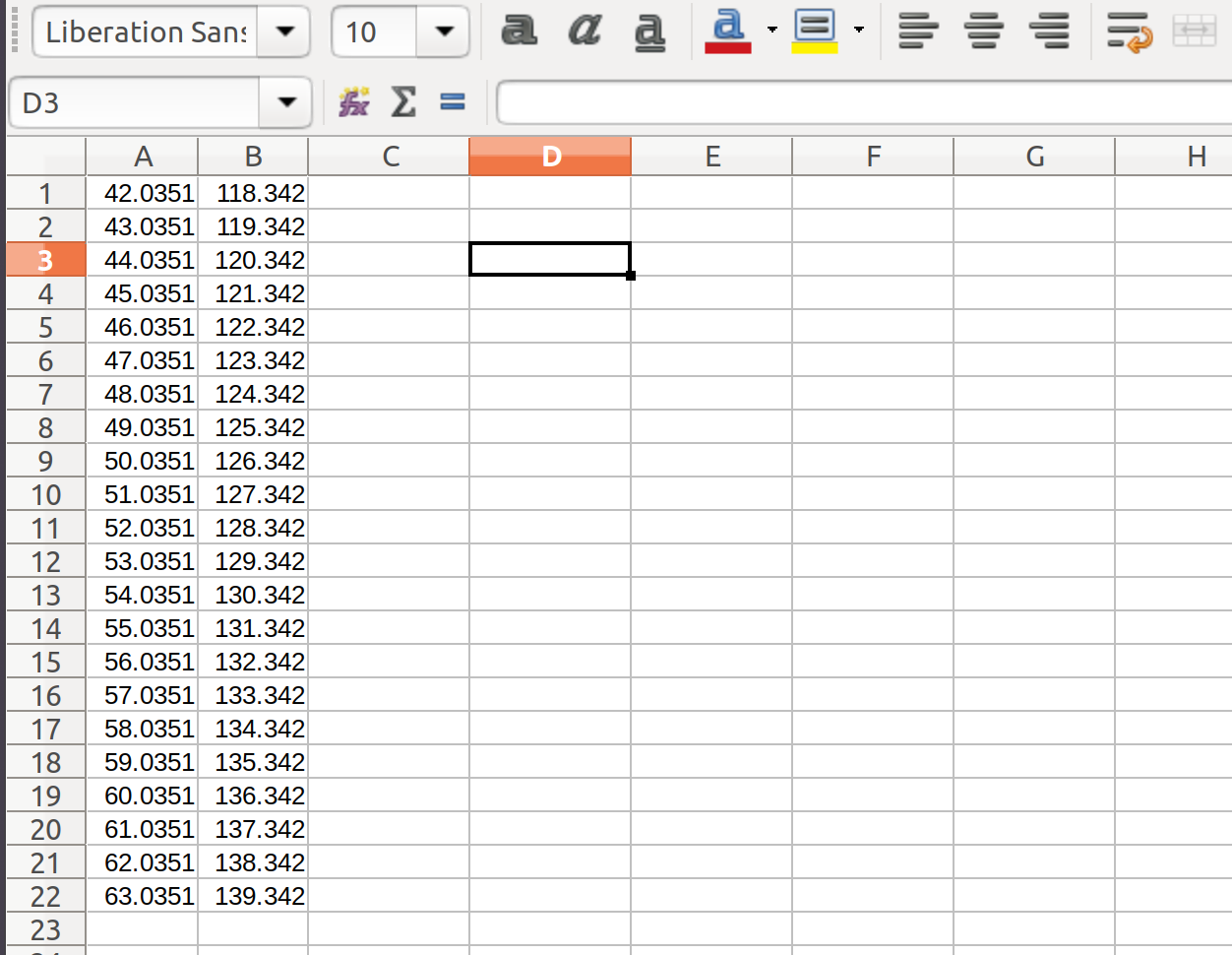
3、成功创建csv文件:
4、记录的gps数据: