ROS 接收键盘控制的虚假里程计节点编写
writer:lIcht email:lIcht.gzl@gmail.com date: 2019.11.24
最近在ros小车底层通讯搭建的时候遇到了问题:小车无法获取实际的里程计,但是需要迫切的搭建tf树来构建上层通讯架构。所以需要一个假的里程计信息来使上层工具包能正常跑起来。
解决思路:由于小车的地盘最终是要根据move_base发出的cmd_vel命令消息对速度进行控制,所以想到由此cmd_vel速度消息直接得到里程计信息(不根据实际的轮速反馈),实现发布/odom主题的发布以及/odom坐标到/base_footprint坐标的tf转换。
fake_odom.cpp:
xxxxxxxxxx float vx; float vy; float vth;void callback(const geometry_msgs::Twist& vel){ float linear_scale = 1.06; vx = (vel.linear.x/1200) * linear_scale; vy = (vel.linear.y/1200) * linear_scale; vth = (vel.angular.z/1200);}int main(int argc, char** argv){ ros::init(argc, argv, "odometry_publisher"); float x = 0.0; float y = 0.0; float th = 0.0; ros::NodeHandle n; ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50); //订阅cmd_vel速度指令主题,并进入回调函数处理 ros::Subscriber velocity = n.subscribe("cmd_vel", 50, callback); tf::TransformBroadcaster odom_broadcaster; ros::Time current_time, last_time; current_time = ros::Time::now(); last_time = ros::Time::now(); ros::Rate r(10); while(n.ok()){ ros::spinOnce(); // check for incoming messages current_time = ros::Time::now(); //compute odometry in a typical way given the velocities of the robot double dt = (current_time - last_time).toSec(); double delta_x = (vx * cos(th) - vy * sin(th)) * dt; double delta_y = (vx * sin(th) + vy * cos(th)) * dt; double delta_th = vth * dt; x += delta_x; y += delta_y; th += delta_th; //since all odometry is 6DOF we'll need a quaternion created from yaw geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th); //first, we'll publish the transform over tf geometry_msgs::TransformStamped odom_trans; odom_trans.header.stamp = current_time; odom_trans.header.frame_id = "odom"; odom_trans.child_frame_id = "base_footprint"; odom_trans.transform.translation.x = x; odom_trans.transform.translation.y = y; odom_trans.transform.translation.z = 0.0; odom_trans.transform.rotation = odom_quat; //send the transform odom_broadcaster.sendTransform(odom_trans); //next, we'll publish the odometry message over ROS nav_msgs::Odometry odom; odom.header.stamp = current_time; odom.header.frame_id = "odom"; //set the position odom.pose.pose.position.x = x; odom.pose.pose.position.y = y; odom.pose.pose.position.z = 0.0; odom.pose.pose.orientation = odom_quat; //set the velocity odom.child_frame_id = "base_footprint"; odom.twist.twist.linear.x = vx; odom.twist.twist.linear.y = vy; odom.twist.twist.angular.z = vth; //publish the message odom_pub.publish(odom); last_time = current_time; r.sleep(); }}
cmd_vel消息数据格式:
xxxxxxxxxxrostopic pub /mobile_base_controller/cmd_vel geometry_msgs/Twist://可看作结构体 linear和angular为<vector>类型,x,y,z为float类型linear: x: 0.5 y: 0.0 z: 0.0angular: x: 0.0 y: 0.0 z: 0.0
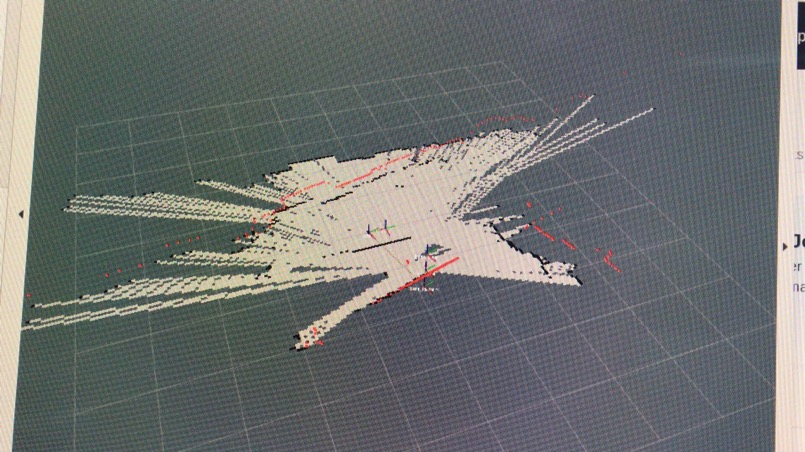
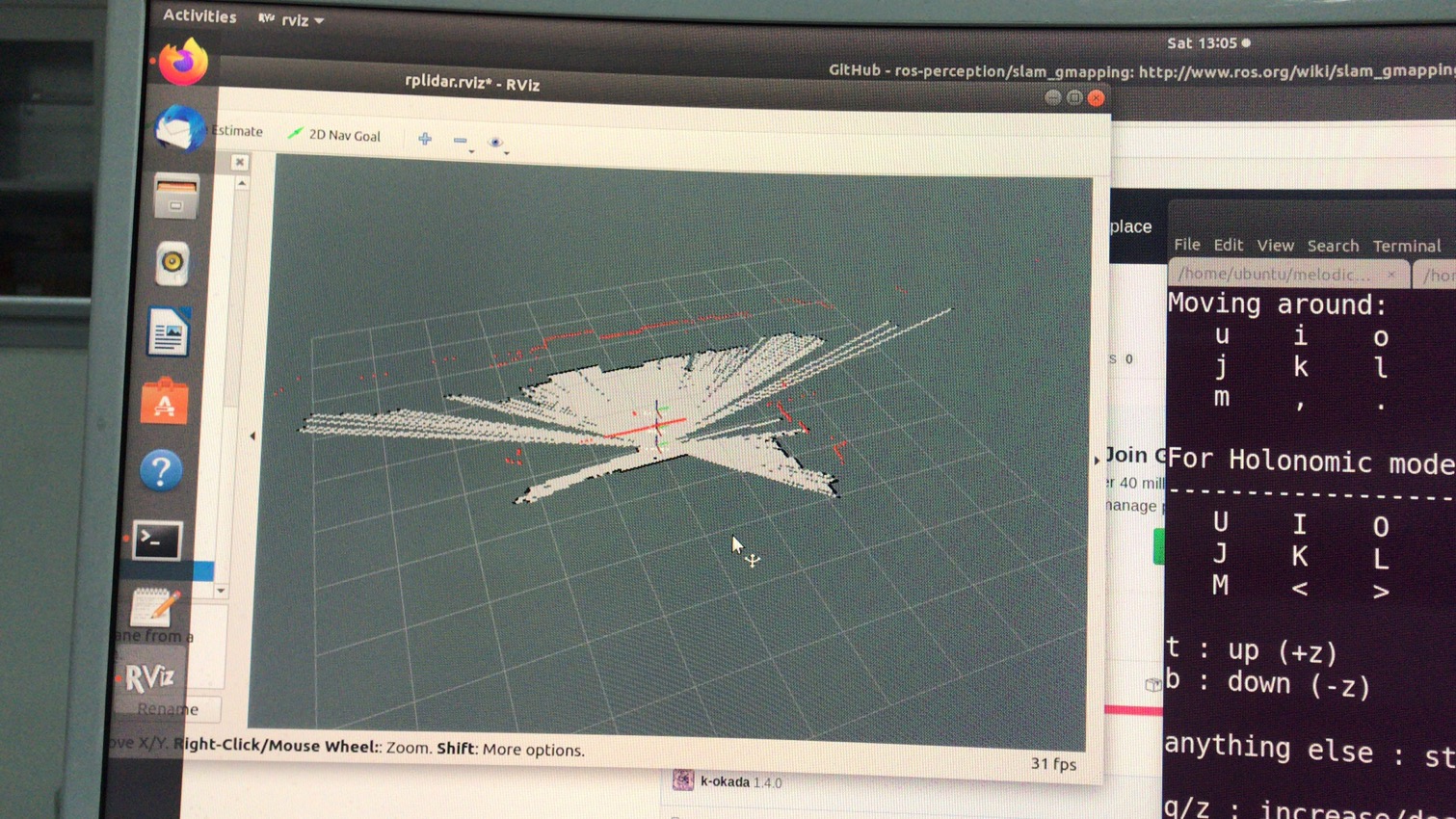
假里程计信息配合雷达信息跑gmapping SLAM的效果(能正常建图与维护动态tf):